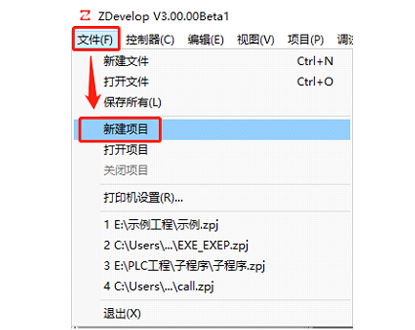
所有EtherCAT控制器均使用同一个编程软件ZDevelop , 所有控制器可以在ZDevelop软件平台下开发,本例中我们以ZDevelop V2.69为例来开发。软件可以到 www.zmotion.com.cn 网站下载。
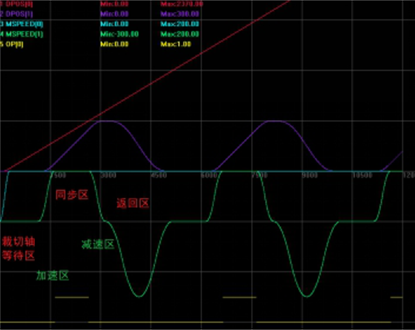
电子凸轮可完成与机械式凸轮相似的功能,而没有机械式凸轮设计难度大、加工成本高、运动高副易磨损等缺点,在许多场合是机械式凸轮的理想替代品。电子凸轮功能也可用来进行不规则曲线的逼近。

在数控加工等应用中,要求数控系统对机床进行平滑的控制,以防止较大的冲击影响零件的加工质量。运动控制器的前瞻预处理功能可以根据用户的运动路径计算出平滑的速度规划,减少机床的冲击,从而提高加工精度。

虚拟仿真与调试日渐成为工业自动化行业的刚需,一是可以在设备未准备就绪之前就把软件基本调试完成,二是进一步提高开发与调试的效率。

早期自动化行业的运动控制大多是:脉冲控制与模拟量控制,后来发展了CANopen,后来各种以太网总线百花齐放,例如:EtherCAT,PROFINET,POWERLINK, SercosIII,RTEX,等等。
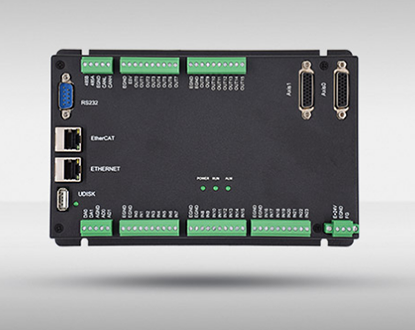
当下EtherCAT总线运控日益普遍,给大家推荐2款脉冲运控升级到EtherCAT总线运控的产品。XPLC864E是正运动公司推出的8轴高性能EtherCAT总线运动控制型超级PLC,是国内很有代表的一款支持EtherCAT总线的运动控制型PLC。

如果有运动控制器,可以下载,调试,程序运行调试(单步调试,断点调试),监控与故障诊断等实验。最好的实践方法是将自己开发的工程下载到运动控制器后,进行模拟实际工况调试。所谓模拟实际工况调试,就是以外部的激励(开关,触摸屏修改参数运行)
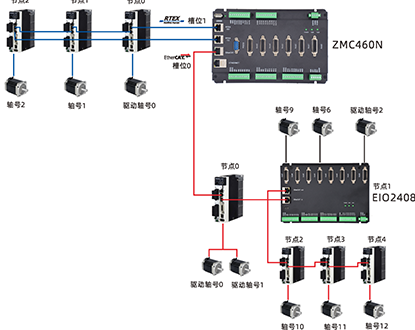
正运动运动控制器涵盖3-16轴脉冲型运动控制器,3-64轴EtherCAT总线型运动控制器,4-60轴RTEX总线型运动控制器。产品具有运动控制功能强大,使用简单易用等特点。
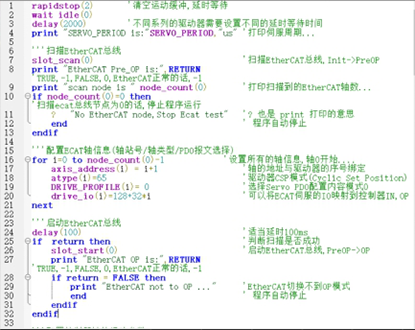
运动控制器如何编程,正运动技术控制器的主要编程方式有以下几种:ZBasic编程、ZPLC梯形图编程、ZMHI组态环境以及XPLC数控准系统。今天我们主要来介绍一下正运动控制器开发软件之ZDevelop的ZBasic编程。





 人事招聘
人事招聘